Kystlinjen – Norges største søppelfylling
Marint søppel er et globalt problem, både miljømessig og økonomisk. Ethvert land med kystlinje, vil kunne oppleve at denne typen avfall forsøpler områdene langs kysten. Vi nordmenn er vant til å tenke på landet vårt som relativt lite, men når vi regner med alt av holmer, fjorder, bukter, øyer og skjær, er kystlinjen vår hele 102 936 kilometer lang. Det gjør den til den nest lengste av alle enkeltlands kystlinjer i hele verden, kun slått av Canada. Da sier det seg selv at marint avfall er et problem vi er nødt til å ta tak i.
Skal samle opp kystnært avfall
Forebygging av denne typen avfall er naturligvis svært viktig. Samtidig må vi anerkjenne at uansett hvor gode vi blir til å forhindre forsøpling, vil det være naivt å tro at havene våre vil bli helt plastfrie. Derfor må vi utvikle verktøy til å håndtere det avfallet som allerede har havnet i sjøen, samt det som måtte havne der i fremtiden. Det er her PortBin robot kommer inn.
Har stått på ønskelisten lenge
Helt siden oppstarten i 2016 har SpillTech ønsket å utvikle en mobil oppsamler av maritimt søppel, styrt med kunstig intelligens og robotteknologi. Det hele startet da Sandefjord havn ønsket seg et overflateavløp som også kunne håndtere avfall i vannoverflaten. SpillTech tok jobben og utviklet PortBin fixed, et fastmontert system for å fange opp søppel i havna.
Omtrent samtidig ble selskapet kontaktet av en slepebåtkaptein med ansvar for å dumpe skytestein fra sprenginger i Moss ut i havet. Kapteinen fortalte om store problemer med sprengtråd fra massene. Han og kollegaene hadde prøvd å fikse problemet selv ved å montere et fotballmål foran ei jolle og kjøre rundt for å plukke opp sprengtrådrestene. Den løsningen ble imidlertid raskt stoppet – og kraftig bøtelagt.
Fra dugnad til finansiering
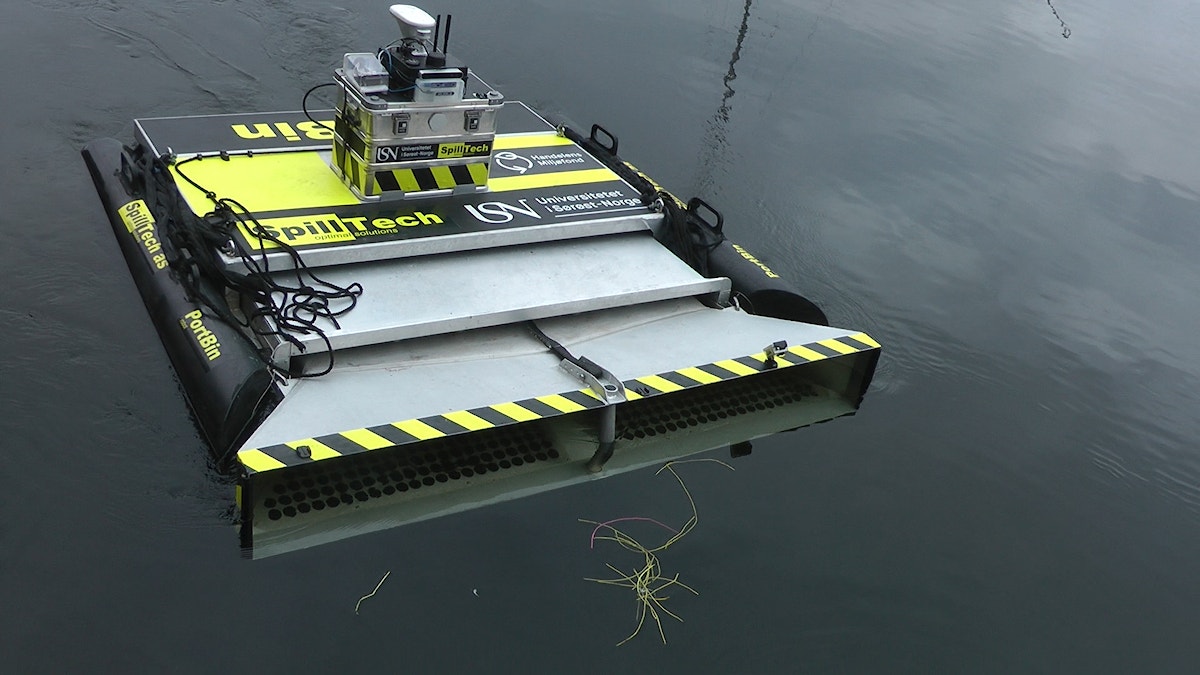
SpillTech så et stadig større behov for en mobil enhet til å fange opp plastavfall på vannet, og ideen om PortBin robot ble lansert. I tillegg til å fange opp marint avfall langs kysten og i havnene, kan roboten bli et godt verktøy i andre avgrensede områder, for eksempel på lenseavgrensede dumpeplasser for skytestein derrester av skytetråd er et problem, akkurat som det var for slepebåtkapteinen i Moss.
Spilltech utviklet en modell av PortBin robot med støtte fra Forskningsrådet. Modellen kom i vannet høsten 2018. Året etter innvilget Handelens Miljøfond SpillTechs søknad om penger til å videreutvikle roboten, og senere samme år fikk roboten endelig prøvd seg på noen praktiske oppgaver i vannet.

Jobber for et mer robust styresystem
For å gjøre PortBin robot mest mulig effektiv, rimelig og robust, tar SpillTech i bruk ny teknologi etter hvert som den blir tilgjengelig. En vesentlig del av midlene fra Handelens Miljøfond har gått til å forbedre robotens evne til å identifisere og forholde seg til strukturer som brygger, skrog, lenser og lignende. Dette arbeidet fortsetter nå, samtidig som selskapet jobber for å gjøre styresystemet mer robust og navigeringen enda mer effektiv. I tillegg utforsker de ulike måter kunstig intelligens (AI) kan brukes, for eksempel ved å utnytte vindretningen for å maksimere fangsten, utvikle dronestøtte eller ta i bruk bildegjenkjenning til å identifisere søppel, slik at roboten kan agere ut ifra hva den «ser».
I starten ble alt arbeidet gjort på dugnad, men takket være støtten fra Handelens Miljøfond kunne SpillTech øke omfanget av arbeidet og få fart på resultatene. Selskapet har også inngått et samarbeid med Universitetet i Sørøst-Norge (USN), som har som mål å være i sentrum for utviklingen av marin autonomi. Dette gjør det mulig for SpillTech å dra nytte av kunnskapen hos både faglærere og studenter innen flere ulike fagretninger ved USN.
Om prosjektet "Portbin robot"
Prosjektet: PortBin robot er en autonom oppsamler for plast og annet søppel som flyter i havoverflaten i kystnære områder, havner og eventuelle andre avgrensede områder.
Søker: Spilltech AS, norsk aksjeselskap registrert i Brønnøysund i 2016.
Mål: Redusere forsøplingen av plast og annet marin- og landbasert avfall på havoverflaten ved å videreutvikle PortBin robot.